 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大极限视场,标出物方视场角ωm。
已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大极限视场,标出物方视场角ωm。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大极限视场,标出物方视场角ωm。
如果结果不匹配,请 联系老师 获取答案
 更多“已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大…”相关的问题
更多“已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大…”相关的问题
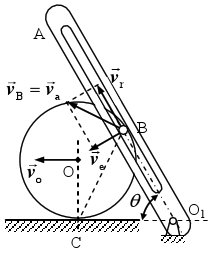
轮O在水平面上滚动而不滑动。轮缘上的固定销钉B可沿摇杆O1A滑动,并带动摇杆绕O1轴转动,如图(a)所示。已知:轮半径R=0.5m,轮心匀速v=0.2m/s。在图示位置时,θ=60°,摇杆O1A与轮相切。试求该瞬时摇杆的角速度ω1和角加速度α1。
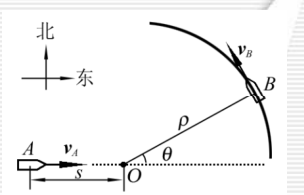
舰艇A和B在静止的海面上,如图(a)所示,分别以匀速vA=vB=36km/h行驶。A艇沿直线向东,B艇则沿以O为圆心、半径ρ=100m的圆弧行驶。已知:在图示位置时,φ=30°,s=50m。试求该瞬时A艇相对于B艇的速度。
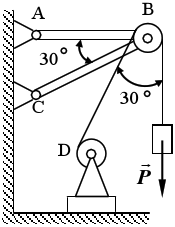
物体重P=20kN,用绳子挂在支架的滑轮B上,绳子的另一端接在绞车D上,如图2-10所示。转动绞车,物体便能升起。设滑轮的大小、AB与CB杆自重及摩擦略去不计,A、B、C三处均为铰链连接。当物体处于平衡状态时,求拉杆AB和CB支杆所受的力。
电路如图2-92所示。已知R1=6Ω,R2=0.1Ω,a=0.98,R3=5Ω,U=4.9V,求Us=?

如图甲所示,在水平地面上放置一个质量为m=4Kg的物体,让其在随位移均匀减小的水平推力作用下运动,推力随位移变化的图像乙所示。已知物体与地面间的动摩擦因数为μ。下列说法正确的是()。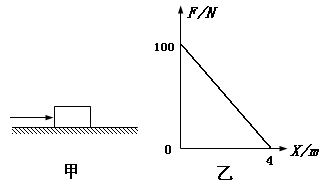
A.物体先做加速运动,推力撤去时开始做减速运动
B.物体在水平面上运动的最大位移是12m
C.物体在运动中的加速度先变小后不变
D.物体运动的最大速度为8m/s
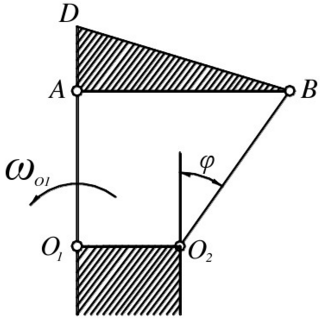
四连杆机构中,连杆AB上固连一块三角板ABD,如图9-15所示。机构由曲柄O1A带动。已知:曲柄的角速度ω0A=2rad/s;曲柄O1A=0.1m,水平距离O1O2=0.05m,AD=0.05m;当O1A⊥O1O2时,AB平行于O1O2,且AD与AO1在同一直线上;角ψ=30°。求三角板ABD的角速度和点D的速度。
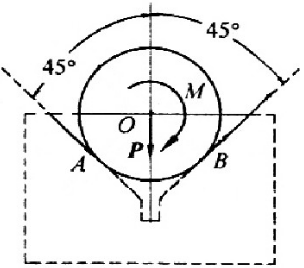
如图5-8所示,置于V型槽中的棒料上作用一力偶,力偶的矩M=15N·m时,刚好能转动此棒料。已知棒料重P=400N,直径D=0.25m,不计滚动摩阻。求棒料与V型槽间的静摩擦因数fs。
A.选择透明玻璃板是为了既能成像又能确定像的位置及观察像的大小
B.这套实验装置可探究平面镜成像大小与物体大小是否有关
C.这套实验装置可探究平面镜成像的像距与物距的关系
D.这套实验装置可探究平面镜成像的大小与物距是否有关
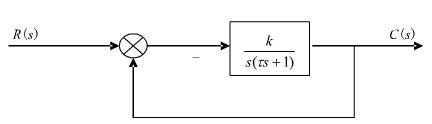
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
A.0~2s内物体处于静止状态
B.4~6s内物体的机械能不变
C.2~4s内物体受到的摩擦力为3N
D.4~6s内拉力对物体做功的功率为8W







 ,试求闭环传递函数
,试求闭环传递函数 。(提示:应用信号流图及梅森公式。)
。(提示:应用信号流图及梅森公式。)








